
Evolution: the practical path to autonomous buses
It’s tempting to frame autonomous driving as a single leap. In public transport, adoption tends to be incremental – because the system is built for reliability, and new capabilities have to fit into daily operations without disrupting service. That is why a practical strategy is evolution, not revolution: introduce autonomy in a defined domain, learn safely in […]

It’s tempting to frame autonomous driving as a single leap. In public transport, adoption tends to be incremental – because the system is built for reliability, and new capabilities have to fit into daily operations without disrupting service. That is why a practical strategy is evolution, not revolution: introduce autonomy in a defined domain, learn safely in real operations, and expand capability step-by-step.
Start in a controlled operating domain
Autonomy becomes operational when it starts in an environment that is predictable, bounded, and safe to learn in. In depots, autonomous movements typically happen at low speed and without passengers on board, which makes early deployments easier to manage and supervise.
Depots are full of repeatable, non-revenue movements:
• staging and repositioning
• parking and re-parking
• moving to charging, washing, servicing
• queueing and shunting
These activities are necessary, but they consume time and capacity. When autonomous driving reduces the manual effort required for depot manoeuvres, the value shows up early in operational terms that are easy to track: recovered driver time, smoother depot flow, and fewer bottlenecks.
That’s why depot-first autonomy is often a practical starting point. It links the learning phase to daily operational outcomes.

What de-risking looks like in real operations
Operators do not adopt autonomous driving as a feature. They adopt an operating capability. De-risking therefore has to cover several layers at the same time:
• Technical: consistency in your depot layout, lighting, weather, and daily variability
• Operational: integration with dispatch, parking, charging, washing, servicing, and shift routines
• People: how drivers, depot staff, supervisors, and maintenance teams interact with the system
• Process: H&S procedures and operating rules, including stop/recovery, exception handling, and how operations resume
• Organisational: whether the change can be absorbed without reducing service reliability or increasing operational overhead
A staged approach makes this manageable. It turns uncertainty into specific questions the organisation can answer with evidence from its own environment.
Why pilots become permanent
Many autonomous driving programmes slow down not because progress stops, but because the programme never shifts from learning activity to a sustainable operating model. Two factors tend to drive that outcome:
Some approaches involve significant up-front capital and implementation effort before benefits are realised. Where costs are tied to a specific setup and require a fleet-wide rollout to achieve acceptable amortisation, deployment is more likely to remain limited to pilot scope.
Autonomy demonstrations can be valuable for technical maturity, but if a safety driver (a human driver on board during autonomous operation) is still required and the autonomy stack remains expensive, the programme can remain a learning exercise. Scaling then becomes difficult, because every additional vehicle adds cost without changing the underlying operating model.
Depot-first autonomy: near-term ROI, clear path to street autonomy
Depot-first autonomy is built around a different premise: the learning phase should create savings.
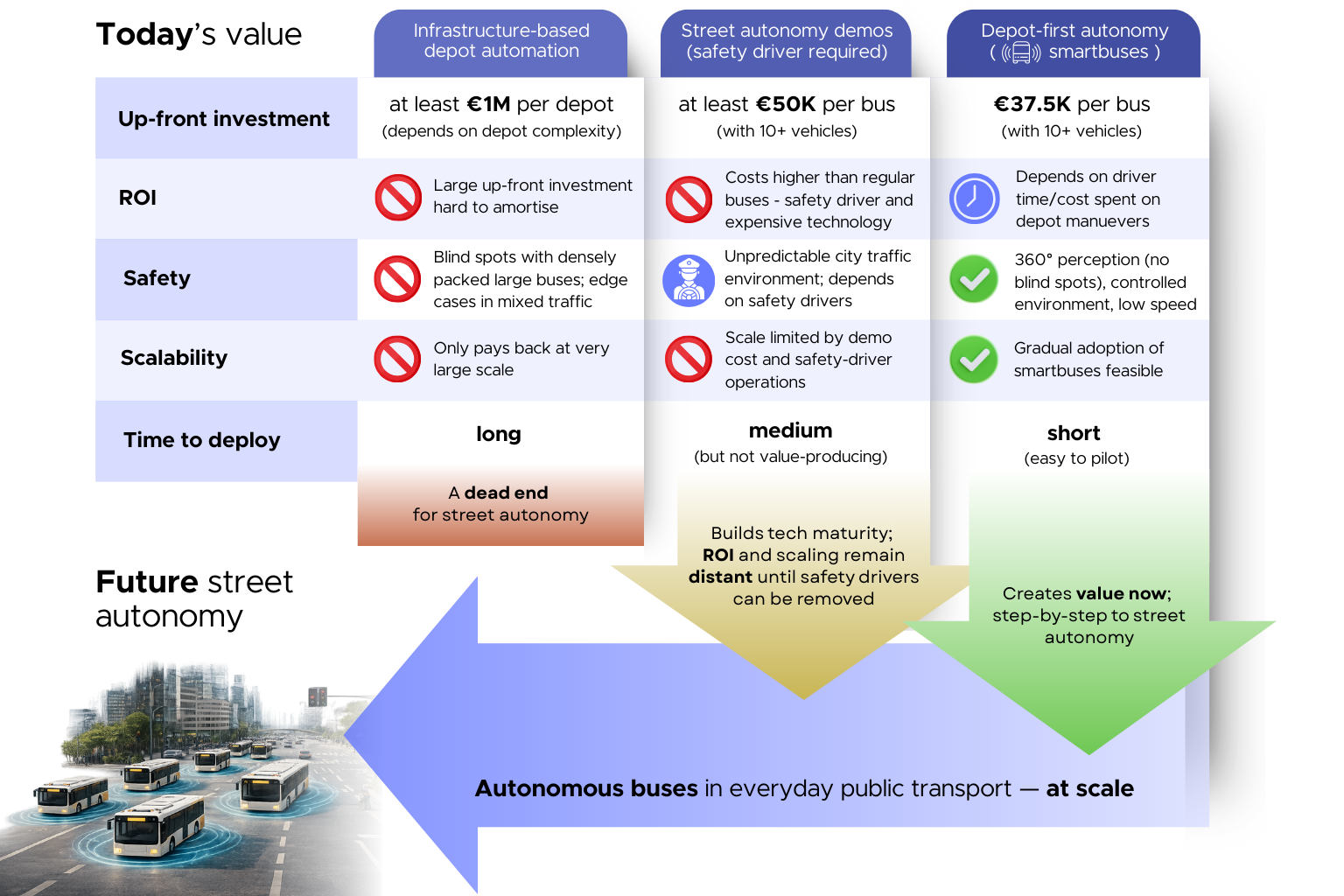
The comparison summarises the trade-offs across up-front cost, time to deploy, safety envelope, scalability, and where (or whether) ROI shows up during the learning phase. Smartbuses – buses equipped with technology for autonomous movements inside the depot – make the adoption trade-offs simpler and more actionable in three ways:
• Avoiding a large, up-front, site-specific investment before benefits begin
• Eliminating dependence on safety drivers
• Linking ROI to local inputs: depot manoeuvre time and total labour cost.
In one line: it links near-term savings with step-by-step readiness for more complex autonomy. Evolution, not Revolution.

Scaling without disruption
The rollout pattern is one operators already recognise from electrification and other complex transitions:
Stage 1: One vehicle
Validate feasibility in your depot, define the operating boundaries, establish staff procedures, and train the first team.
Stage 2: Small fleet
Move from “does it work?” to “can we run it routinely?” Integrate with depot workflows and measure stability across shifts and conditions.
Stage 3: Larger volumes
Standardise training and operations, reduce overhead through repeatability, and improve unit economics as the fleet grows.
At the end of this progression, operators have trained teams who understand how autonomous driving behaves, procedures that make exceptions manageable, and performance that can be tracked week after week. In public transport, that’s how autonomous driving becomes real: start in a controlled operating domain, learn in day-to-day operations, and scale what works without disrupting core service.
Street autonomy is the destination. Evolution is how you get there without breaking reliability.

by Autonomous Systems








